3D Urban Tree Intelligence
A hands-on international hackathon and implementation testbed for turning 3D point clouds into practical information for urban tree management.
In Bratislava, we will test LiDAR sensors, mobile mapping systems, low-cost prototypes, and processing workflows in real city conditions.
Help define what 3D urban tree monitoring should deliver for cities
We are inviting urban tree managers, greenery departments, arborists, planners and city stakeholders to tell us what they need from 3D point clouds and LiDAR-based monitoring.
Your response can directly influence what we test during and after the Bratislava hackathon and what guidance we prepare for cities afterwards.
Testing 3D tree monitoring in a real city
Urban trees are essential living infrastructure. They shape shade, cooling, biodiversity, carbon storage, public space, stormwater regulation, and the quality of everyday urban life.
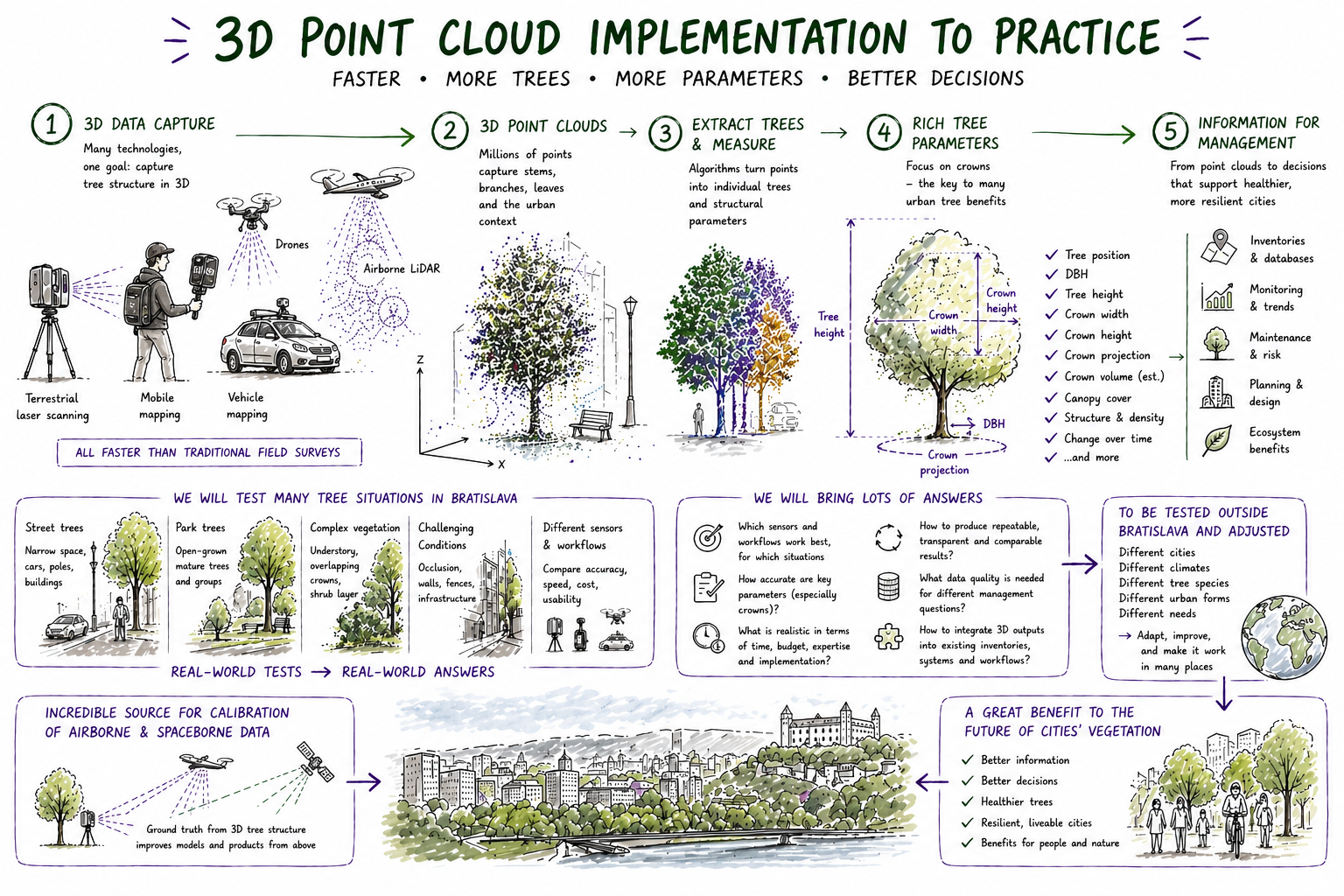
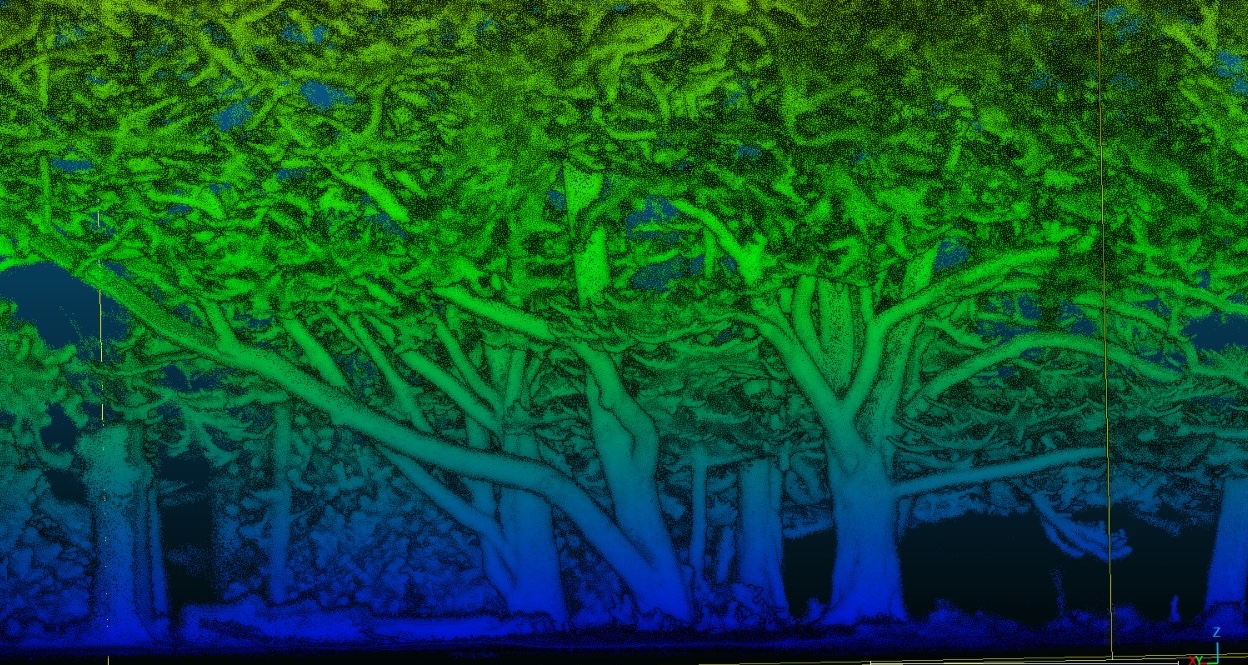
To manage and monitor them well, we need to understand not only where trees are, but also their three-dimensional structure: stems, crowns, height, crown spread, growth form, and how these properties change over time.
New 3D sensing technologies are making this increasingly practical. Terrestrial laser scanning, handheld and backpack mobile mapping, vehicle-based systems, drones, airborne LiDAR, and new low-cost prototypes can now collect detailed tree-structure data much faster than before.
The Bratislava hackathon will bring together researchers, practitioners, hardware providers, software developers, and urban-tree stakeholders to test how these technologies can support real-world urban vegetation management.
How 3D tree data can become practical city intelligence
The hackathon will test the full chain: capturing 3D data, creating point clouds, extracting individual trees, measuring richer tree parameters, and translating the results into information that can support inventories, monitoring, planning, and future implementation pilots.
A one-week implementation testbed
From 1–5 June 2026, participants will work in Bratislava to scan selected urban tree sites, process point clouds, compare workflows, and define practical outputs for urban tree monitoring.
This is not only a conference and not only a data-collection campaign. It is a coordinated experiment: sensors, processing methods, data standards, field protocols, and management questions will be tested together.
The goal is to understand which combinations of hardware and software are fit-for-purpose for tree detection, tree catalogues, DBH, height, crown parameters, uncertainty reporting, and repeatable monitoring.
Sensors, workflows, and practical outputs

3D sensing systems
Static TLS, handheld mobile laser scanning, backpack systems, vehicle-based mapping, drone-derived point clouds, airborne LiDAR, and low-cost prototypes.
Processing workflows
Tree extraction, individual tree detection, catalogue creation, DBH, height, crown metrics, QSM, biomass-related structure, uncertainty, and reproducibility.

Management relevance
Which outputs are useful for city tree inventories, crown assessment, monitoring, planning, maintenance prioritisation, and future implementation pilots?
Do you manage urban trees?
If you are a city, municipality, public authority, utility company, park manager, arboricultural team, urban forestry unit, or vegetation manager, we would like to hear from you.
We are especially interested in real management questions: which tree parameters matter, which measurements are difficult to collect today, what outputs would be useful, and how 3D monitoring could support future city workflows.
If you manage urban trees anywhere in the world and want to explore whether these solutions could be tested in your city or organisation, please get in touch.
Contact: Dr. Martin Mokros, UCL, m.mokros@ucl.ac.uk

A real urban landscape for testing
Bratislava provides a real city context for testing 3D urban-tree monitoring. The hackathon will work with heterogeneous urban sites, including street trees, park trees, tree clusters, trees near buildings, trees with shrubs or understory, and locations with direct municipal relevance.
The local setup includes municipal tree data, airborne LiDAR campaigns, drone surveys, RTK support, ground-control measurements, and engagement with people responsible for urban vegetation management.
This makes Bratislava a strong place to test not only whether a sensor can produce a point cloud, but whether the resulting data can become useful tree-level information.
Bring your system into a real urban-tree testbed
We welcome engagement from companies, sensor developers, mapping teams, and technology providers working with LiDAR, mobile mapping, robotics, drones, SLAM, point-cloud processing, tree analytics, or urban vegetation intelligence.
The Bratislava hackathon is an opportunity to test systems under realistic urban conditions, understand what tree managers actually need, compare operational constraints, and contribute to an emerging practical pipeline for 3D urban tree monitoring.
We are particularly interested in systems that can help collect or process data faster, reduce field burden, improve repeatability, support tree-level catalogues, or make 3D structure accessible to non-specialist urban-vegetation teams.
Hardware providers
Bring or propose terrestrial, mobile, backpack, vehicle, drone, or prototype sensing systems for realistic urban-tree testing.
Software teams
Contribute workflows for segmentation, tree detection, DBH, height, crown metrics, catalogues, QSM, biomass, or uncertainty reporting.
Implementation partners
Help translate point clouds into practical outputs for inventories, monitoring, planning, and future pilot deployments.

